Salute e ricerca. Robot autonomo per la chirurgia dei tessuti molli
WASHINGTON – La supervisione autonoma della chirurgia robotica dei tessuti molli, su un soggetto vivo, in un ambiente chirurgico è fattibile e sorpassa tecniche cliniche standard in un ambiente clinico dinamico. Lo studio, pubblicato poche recentemente sulla prestigiosa rivista scientifica Science Translational Medicine, riporta i risultati di interventi chirurgici dei tessuti molli condotti utilizzando la tecnologia chirurgica intelligente “Tissue Robot Autonomo” (STAR).
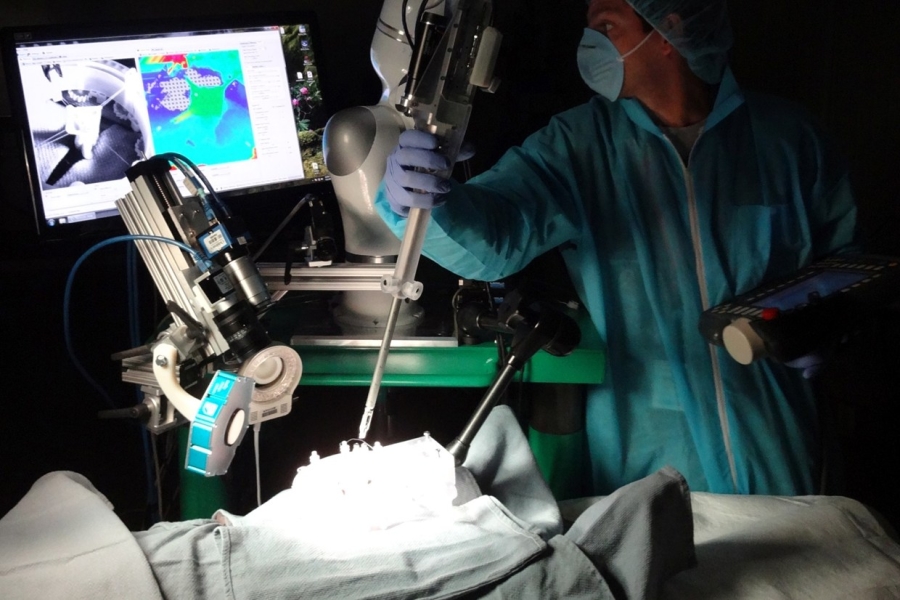
I tessuti molli sono i tessuti che connettono, supporto o circondano altre strutture e organi del corpo, come i tendini, legamenti, pelle, tessuti fibrosi, grassi, membrane sinoviali, muscoli, nervi e vasi sanguigni. Nel corso degli anni, l’esecuzione della chirurgia dei tessuti molli è rimasta interamente manuale, soprattutto grazie ai cambiamenti imprevedibili, elastici e plastici dei tessuti molli che si verificano durante l’intervento chirurgico, che richiedono al chirurgo di eseguire costantemente degli aggiustamenti. Questa nuova tecnologia eliminerebbe le mani del chirurgo durante la procedura e utilizzerebbe un chirurgo supervisore, con sutura autonoma e programmata dei tessuti molli grazie al sistema robotico STAR.
“L’intento di questa iniziativa non è quello di sostituire i chirurghi, ma di espandere la capacità umana per migliorare i risultati chirurgici.”, ha sostenuto il Dottor Peter C. Kim, vice presidente del Sheikh Zayed Institute for Pediatric Surgical Innovation di Washington, l’Hub finanziato da numerose compagni internazionali per rendere la chirurgia pediatrica più precisa, meno invasiva e senza dolore.
Per superare questa sfida, STAR utilizza un sistema di monitoraggio che integra marcatori infrarossi fluorescenti (NIRF) e una visione Plenoptic 3D che cattura le informazioni del campo di luce per fornire immagini in 3 dimensioni. Questo sistema permette di inseguire il movimento e i cambiamenti del tessuto durante la procedura chirurgica. Questo monitoraggio è combinato con un’altra innovazione, ovvero un algoritmo intelligente che guida il piano chirurgico a una serie di adattamenti in tempo reale, mentre i tessuti si muovono e altri cambiamenti si verificano. “Fino a ora la chirurgia autonoma è stata limitata ad applicazioni con anatomia rigida, come il taglio delle ossa, perché sono più prevedibili”, ha detto Axel Krueger, responsabile tecnico per Smart Tools, presso Sheikh Zayed Institute.
Per confrontare l’efficacia di STAR ad altre procedure chirurgiche disponibili, lo studio ha incluso due diversi interventi chirurgici eseguiti sul tessuto suino inanimato, ex vivo: sutura lineare e un’anastomosi intestinale end-to-end che prevede il collegamento di anse tubolari dell’intestino. I risultati di ogni intervento chirurgico sono stati confrontati con la stessa procedura chirurgica effettuata manualmente da un chirurgo esperto, per via laparoscopica. Lo studio ha confrontato questi risultati alla stessa procedura effettuata manualmente da un chirurgo esperto, utilizzando strumenti chirurgici standard. Tutti gli interventi chirurgici sono stati confrontati basandosi sulle metriche di anastomosi, tra cui la coerenza della sutura basato su spaziatura media di sutura, la pressione alla quale l’anastomosi perdeva, il numero di errori che richiedevano rimuovere l’ago dal tessuto, il tempo di completamento e la riduzione del lume. Dal confronto è emerso che la supervisione delle procedure attraverso ausili robotici autonomi si è dimostrata superiore a un intervento chirurgico eseguito da chirurghi con esperienza. Da quanto appreso, sembra dunque che la chirurgia robotica autonoma per le procedure dei tessuti molli si sia dimostrata efficace. A questo punto, un passo successivo nel ciclo di sviluppo potrebbe essere un’ulteriore miniaturizzazione di strumenti e sensori per consentire un uso più ampio del Sistema Star.

- Salute. Troppo tempo davanti al computer? Attenti alla postura - 16 Dicembre 2016
- Tecnologia e salute. Sonographer? No, arriva il robot - 8 Dicembre 2016
- Salute. Pelle secca? Non serve bere molto - 5 Dicembre 2016



